
Pistas Balanceadas e Não Balanceadas
Neste ponto do estudo, convém relembramos que existem sete fases e fatores que devem ser considerados para encontrar o limitante de peso de decolagem: Limitante por Pista, Limitante por Freios, Limitante por Pneus, Limitante por V1 Mínima; Limitante por Trajetória de Decolagem, Limitante por Obstáculos e Limitante por tempo de uso da Potência Máxima de Decolagem. Até o momento, abordamos somente os três primeiros.
Antes de prosseguirmos na análise dos demais limitantes de decolagem, vamos aprofundar o conceito de Velocidade de Decisão (V1) que abordamos anteriormente. Uma melhor compreensão dessa importante velocidade é fundamental para que o piloto possa operar com pesos de decolagem otimizados.
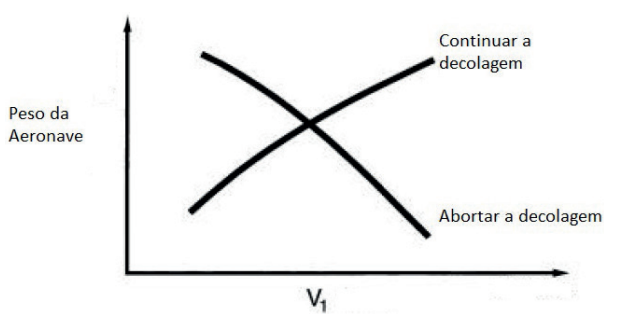
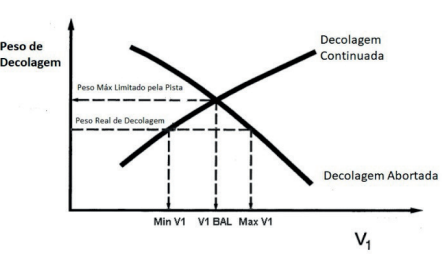
Com base na figura anterior, podemos observar que, para um comprimento de pista fixo (assim como fixos a altitude, a temperatura e a posição dos Flapes), um incremento na V1 resultará na disponibilidade de um maior peso de decolagem (considerando “Accelerate-Go”, ou seja, prosseguir na decolagem após a V1), devido à redução de tempo e de distância para aceleração entre a VEF e a VR, mas um menor peso de decolagem considerando a execução de uma rejeição de decolagem (“Accelerate-Stop”), devido à maior quantidade de energia cinética a ser absorvida durante a manobra de frenagem. Similarmente, uma V1 menor resulta em menor peso de decolagem (“Accelerate-Go”) e maior peso de decolagem de rejeição (“Accelerate-Stop”).
A interseção das linhas “Continuar a decolagem” e “Abortar a decolagem” define o peso máximo do avião (e a menor pista necessária para decolagem) que satisfaz os critérios “Accelerate-Go” e “Accelerate-Stop”. Quando esse peso é menor do que o Peso Limitado por Comprimento de Pista para a operação com todos os motores (AEO), ele se torna o Peso Limitado por Comprimento de Pista para decolagem (situação que pode ocorrer com aeronaves trimotoras ou quadrimotoras) (SAINTIVE, 2011).
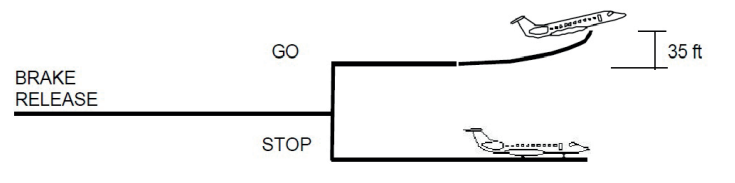
A decolagem é então descrita como em um “Peso Limitado por Comprimento de Pista Balanceada”, pois as distâncias “GO” e “STOP” são iguais. É caracterizada pelo fato de que o avião utilizará todo o comprimento da pista para atingir 35 pés, no caso de prosseguir na decolagem após a V1, bem como para desacelerar e parar a aeronave no caso de uma abortiva / rejeição (RTO) iniciada na V1. Quando as distâncias AGD e ASD são iguais, dizemos que a Pista e a V1 correspondente são “Balanceadas”. A figura abaixo ilustra essa situação.
Você deve se recordar que, anteriormente, abordamos os conceitos de Stopway e Clearway. Na ocasião, explicamos que tais “áreas” são empregadas para “estender” o comprimento das pistas, e são, respectivamente, utilizadas para desacelerar a aeronave ou permitir que prossiga na decolagem após a perda de um motor. Então, em relação ao conceito de “Balanceamento de uma Pista”, temos as seguintes situações:
Decolagem padrão em Pista Balanceada
Para uma decolagem com V1 e Pista balanceados, a distância horizontal que o avião usa para subir até 35 pés é igual a distância necessária para parar o avião, após a V1.
Decolagem com Pista Desbalanceada por Clearway:
Se uma Clearway estiver disponível, o avião pode atingir 35 pés em um ponto sobre a Clearway – ou seja, houve um alongamento da TODA (Takeoff Distance Available), o que permite uma maior AGD (Accelerate and Go Distance). Com uma TODA maior, é possível que o avião decole com um peso maior, devido a maior distância disponível para atingir 35 pés. Entretanto, considerando-se somente a existência da Clearway (ou seja, sem alteração da ASDA – Accelerate and Stop Distance), o peso maior requer que seja selecionada uma V1 menor (em comparação à V1 Balanceada).
Isso porque, com uma mesma ASDA, a aeronave ainda deve ser capaz de parar na pista disponível. Lembre-se de que a Clearway não pode ser usada para parar a
aeronave, num caso de abortiva. Nessa situação, ao modificarmos a V1, dizemos que o Comprimento da Pista e a V1 estão “Desbalanceadas” por uma Clearway
Decolagem com Pista Desbalanceada por Stopway:
Empregando o mesmo pensamento do item anterior, em caso de existência de uma Stopway, a distância disponível para parar o avião após a V1 é aumentada. Isso permite um peso de decolagem maior, mas requer uma V1 igualmente maior do que a V1 Balanceada, para garantir que o avião ainda possa alcançar a altura de 35 pés até o final da pista (considerando que não há Clearway), no caso de decidir-se em prosseguir na decolagem. Ao modificarmos a V1, dizemos que o Comprimento da Pista e a V1 estão “Desbalanceadas” por uma Stopway.
A figura abaixo resume as três situações anteriores. O primeiro caso é de uma pista Balanceada, com a AGD e ASD iguais e o peso de decolagem “W”. O segundo caso é o de uma pista Desbalanceada por Clearway, sendo que o peso de decolagem poderá ser maior do que “W”, porém, com a necessidade de redução da V1 em relação à V1 Balanceada. No último caso, vemos uma Pista Desbalanceada por Stopway, com um peso de decolagem que poderá ser maior do que “W”, mas agora com a necessidade de uma V1 maior do que a V1 Balanceada:
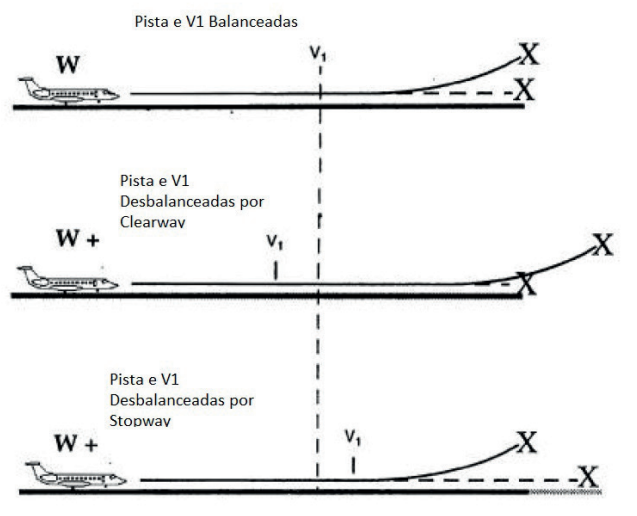
Na imagem acima, percebe-se que há um aumento da AGD e da ASD. Tais aumentos não são necessariamente iguais, ou seja, do mesmo comprimento, pois dependerão do tamanho da Clearway / Stopway. A influência de cada uma no aumento da disponibilidade de peso também irá depender de outros fatores como a altitude, a temperatura e o coeficiente de atrito da pista. Via de regra, Clearways costumam ser maiores do que as Stopway, em comprimento. Agora, repare na figura abaixo:
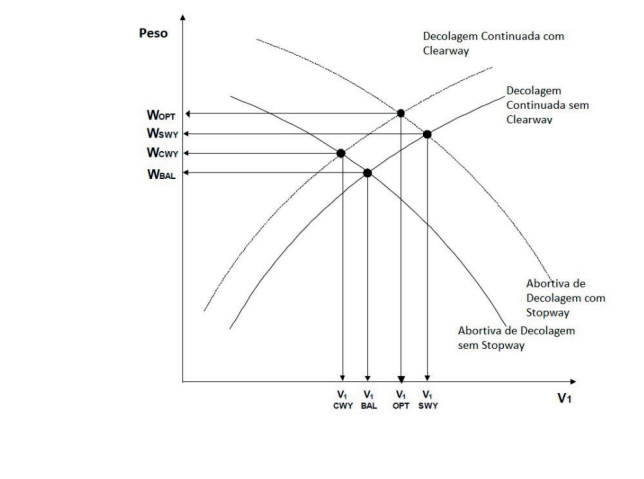
A V1 OPT é a V1 otimizada, calculada usando tanto a Clearway quanto a Stopway disponível. No gráfico da figura anterior, V1 CLW, V1 SWY e V1 OPT são V1 “Desbalanceadas”. O peso máximo de decolagem limitado pela pista (limitante de peso determinado pela pista de decolagem) é WOPT, e V1 OPT pode ser maior ou menor que V1 BAL (V1 “Balanceada”), dependendo de qual fator afeta mais o aumento de peso – a Clearway ou a Stopway.
Como regra geral, V1 CWY será sempre menor que V1 BAL, e V1 SWY será sempre maior que V1 BAL (o uso da Clearway diminui a V1 e o uso da Stopway aumenta a V1).
Agora, repare na próxima figura. Nela, é possível observar que existe uma faixa de V1 válida, que pode ser usada se o peso real de decolagem for menor do que o Peso Máximo de Decolagem Limitado Pelo Comprimento de Pista. O uso da menor V1 da faixa resultará na aeronave atingindo a altura de 35 pés (prosseguir na decolagem) no final da pista, mas parando a aeronave antes do final da pista (no caso de abortiva na V1).
Já o uso da maior V1 da faixa resultará na aeronave atingindo a altura de 35 pés (prosseguir na decolagem) antes do final da pista, mas parando a aeronave no final da pista após a V1 (aceleração-parada).
O uso de uma V1 entre o menor e o maior valor resultará em uma AGD e uma ASD inferiores ao comprimento total da pista.
A fim de simplificar os procedimentos dos pilotos em relação à determinação das velocidades de decolagem, algumas empresas aéreas preferem usar o conceito de uma V1 fixa. Digamos, por exemplo, que uma companhia aérea tenha decidido sempre usar uma V1 igual à VR.
Nesse caso, o procedimento para o piloto determinar a V1 é simplificado (V1 será sempre igual à VR, independentemente do peso, temperatura ou vento de decolagem).
Porém, como resultado, o peso máximo de decolagem limitado pelo comprimento da pista poderá ser penalizado em alguma situação (conforme figura anterior, sempre que a V1 for distinta da V1 Balanceada). Se o operador da aeronave a emprega em pistas grandes e localizadas em baixas altitudes, provavelmente o emprego de uma V1 fixa não causará impactos no peso de decolagem (avaliando-se somente o comprimento da pista, sem levar com conta a existência de obstáculos após a decolagem, por exemplo).
Em cálculos de desempenho de decolagens desbalanceadas, onde um intervalo de V1 pode ser usado, pode ocorrer que o melhor resultado encontrado para a V1 seja menor do que a V1 MIN (recorde o conceito de V1 Mínima, visto anteriormente). Isso ocorre com mais frequência em cálculos de decolagem para pistas molhadas e escorregadias, em que a V1 é baixa devido ao prejudicado desempenho de aceleração e parada da aeronave (ou seja, a V1 é reduzida para permitir que a mesma possa desacelerar e parar nos limites da pista após a V1, constatada uma emergência que justifique essa manobra abortiva).
Quando isso ocorre, é necessário selecionar uma relação V1 / VR mais alta, penalizando assim o peso de decolagem. Neste caso, dizemos que o peso de decolagem é limitado pela V1 MIN.
Em algumas situações, é possível superar a limitação da V1 MIN reduzindo o empuxo dos motores da aeronave, ou seja, aumentar o peso de decolagem diminuindo o empuxo de decolagem. Isso parece contraditório, mas não o é. É possível porque uma redução da potência dos motores (uso de empuxo reduzido/ degradado) resultará em uma redução da VMCG, reduzindo assim a V1MIN.
As modernas aeronaves contam com computadores que controlam a potência dos motores, com base em diversos fatores como temperatura e altitude pressão. Tais
aeronaves costumam contar com diversos regimes de potência disponíveis, que podem ser facilmente selecionados pelos pilotos. Usualmente, tais regimes podem
ser: Potência de Decolagem, Potência de Subida, Potência de Cruzeiro e Potência Máxima de Uso Contínuo. O regime de Potência de Decolagem pode ser dividido
em dois ou mais regimes, para permitir a degradação da potência em relação ao regime normal de decolagem, conforme abordaremos rapidamente a seguir.
Emprego de Potência Degradada de Decolagem (Decolagem com Tração Reduzida)
Os motores de uma aeronave são desenhados para disporem de um determinado empuxo nominal para empregar nas decolagens. Usar mais do que esse empuxo
nominal não é permitido como um procedimento usual, porque isso afeta seriamente a vida útil do motor (que irá operar com temperaturas mais altas). Entretanto, já o caso oposto é viável. Se o peso de decolagem da aeronave estiver muito abaixo do limitante de decolagem, e as velocidades associadas forem recalculadas para um novo regime, então poderá ser usado um valor menor que o empuxo nominal de decolagem.
Então, o que acontece na prática? Um voo está programado para acontecer. A tripulação recebe o brifim do despacho operacional e prossegue para o avião. Após tomar ciência das condições atualizadas do aeródromo e do carregamento da aeronave, a análise da pista deve ser verificada com o peso correto e final da aeronave. Vamos supor que o peso real da aeronave seja de 17.000 Kg e o peso máximo de decolagem, para as condições que se apresentam considerando a potência máxima nominal de decolagem, seja mostrado na análise da pista como sendo de 20.000 Kg. Isso significa que o empuxo de decolagem nominal será maior do que o empuxo necessário para decolar.
Então, o uso de empuxo reduzido tem a grande vantagem de “economizar” os motores, diminuindo a temperatura de operação da turbina. A longo prazo, essa economia é muito significativa em termos de tempo entre revisões e de custos de revisão dos motores, o que influi nos custos operacionais da empresa e aumenta a sua eficiência (EMBRAER, 2001).
Os procedimentos de decolagem com tração reduzida devem garantir que a redução de tração nunca seja superior a 25% da tração máxima de decolagem disponível
(lembrando que a decolagem com tração reduzida é uma operação certificada pelos órgãos homologadores e que cumpre com todas as margens de performance
requeridas). No caso das aeronaves Boeing 737-700, por exemplo, a operação com tração reduzida é realizada utilizando o “Método da Temperatura Assumida”, o qual
se baseia em considerar que a temperatura local é superior à real, obtendo-se uma tração de decolagem suficiente para o peso real de decolagem.
Para um peso de decolagem e OAT fixos, a utilização de tração reduzida de decolagem, ao invés de tração máxima de decolagem, resulta numa operação mais próxima dos limites de performance da aeronave.
Bem, nesse ponto você pode estar se perguntando: ora, ocorrendo a perda de um motor durante a decolagem, o fato de utilizar uma potência reduzida não comprometerá o desempenho da aeronave para prosseguir na decolagem e, posteriormente, comprometer também o desempenho nos segmentos de subida? A esposta é não. As aeronaves que operam com regimes de potência de decolagem degradada, que são definidos automaticamente por sistemas computacionais, possuem uma lógica que comanda o emprego de potência máxima de decolagem nos motores em operação, sempre que ocorre a perda de um dos motores nessa fase. Assim, ao perder um motor, por exemplo, os motores restantes são acelerados automaticamente para a potência máxima de decolagem, para garantir adequado desempenho nas fases seguintes. Na ocorrência de falha ou inexistência de automação, ou no caso de emprego do Método de Temperatura Assumida, os pilotos podem a qualquer momento avançar os manetes de potência até o máximo do regime de decolagem.
Em complemento, seguem algumas considerações usuais sobre o emprego do Método de Temperatura Assumida, para uso de tração de decolagem reduzida:
- a utilização de tração reduzida é proibida em pistas contaminadas (água, neve, slush (mistura de neve e sujeira), gelo) ou com antiskid da aeronave inoperante;
- não é recomendada a utilização de tração reduzida se existirem condições meteorológicas potenciais para a formação de Windshear,
no segmento de decolagem; e - é permitida a utilização de tração reduzida em pistas molhadas, desde que sejam utilizadas as análises de decolagem calculadas para a condição “Wet”.
Afinal, quais são as vantagens de uso de cada método de tração reduzida? O método da “temperatura assumida” tem a vantagem de permitir um ajuste fino da redução. Por outro lado, o método de “redução automatizada da tração” é mais simples porque o piloto não precisa ajustar os manetes de potência. Eles são simplesmente movidos para a posição de decolagem, com a correta seleção do regime selecionado. Esse último método também tem a vantagem de produzir dados estatísticos mais consistentes sobre a vida útil do motor, porque os dados de voo podem ser agrupados em dois tipos de decolagem somente (“com” ou “sem” tração reduzida). O uso do método da “temperatura assumida” resulta em dados estatísticos onde em cada decolagem os parâmetros de potência do motor são selecionados de forma diferente (EMBRAER, 2001).
Bem, até o momento abordamos quadro dos sete fatores de ensaio que podem limitar o peso de uma decolagem. Foram eles: Limitante por Pista, Limitante por Freios, Limitante por Pneus e Limitante por V1 Mínima. Para complementar o nosso estudo, passaremos a tratar dos demais limitantes de decolagem, quais sejam: Limitante por Trajetória de Decolagem, Limitante por Obstáculos e Limitante por tempo de uso da Potência Máxima de Decolagem.